







安装和操作说明
超声波传感器可以安装在任何位置工作,然而要避免将传感器安装在表面容易受污染的地方。水滴和严重的灰尘堆积都会影响超声波的功能,但是细小的灰尘和溅起的污渍不会影响功能。
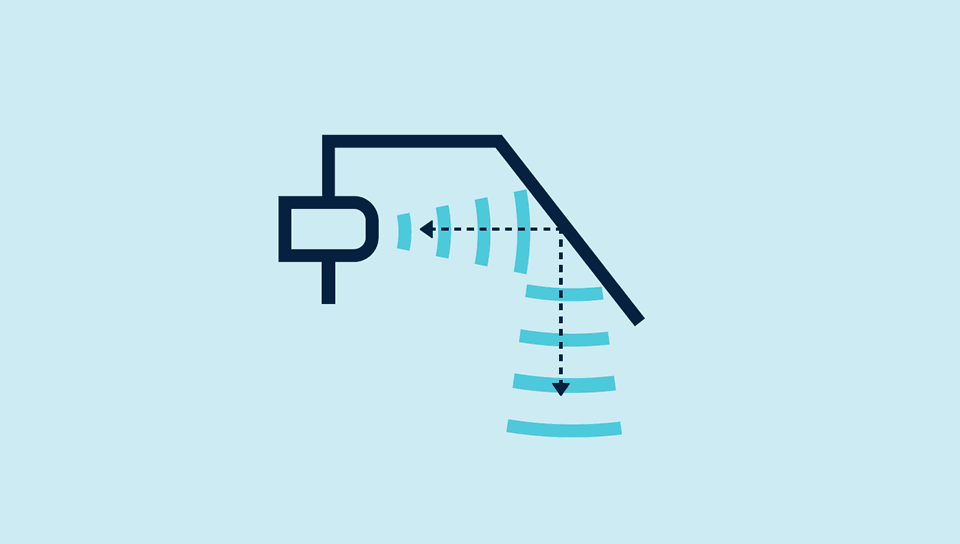
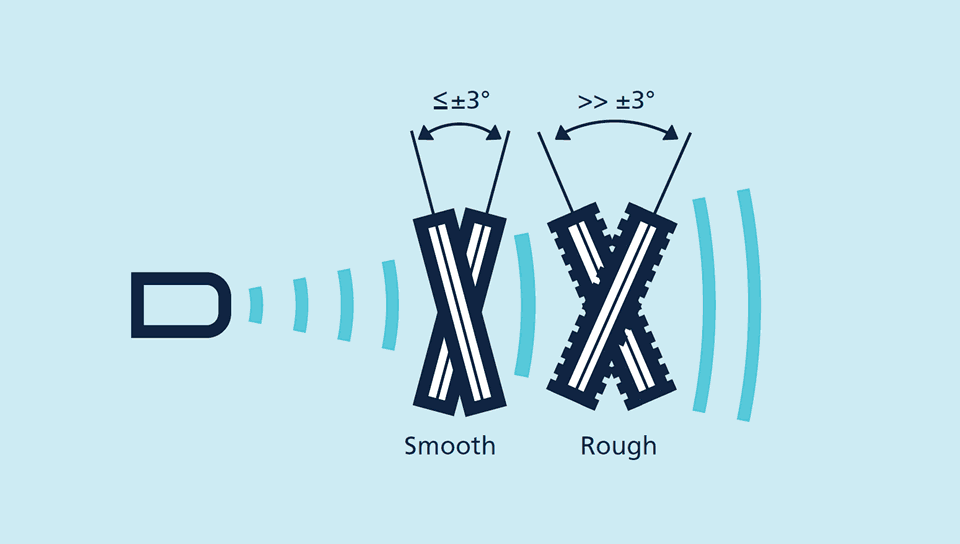
为了检测表面扁平和光滑的物体,传感器需要与检测物表面成90±3°安装。
另一方面,粗糙的表面可以用更大的角度偏差》±3°来安装。对于超声波传感器来说,如果物体表面的最高点和最低点之间的距离大于或等于该频率超声波的波长,那么物体表面可认为是粗糙的。
声波被散射后会使工作范围缩小,对于表面粗糙的物体,允许的最大安装角度和最大可能的检测范围应该通过实验的方式确定。
一些吸波材料,例如:棉花和海绵会缩短工作范围。另一方面,液体和固体材料能很好的反射声波。
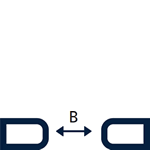
安装间距和同步
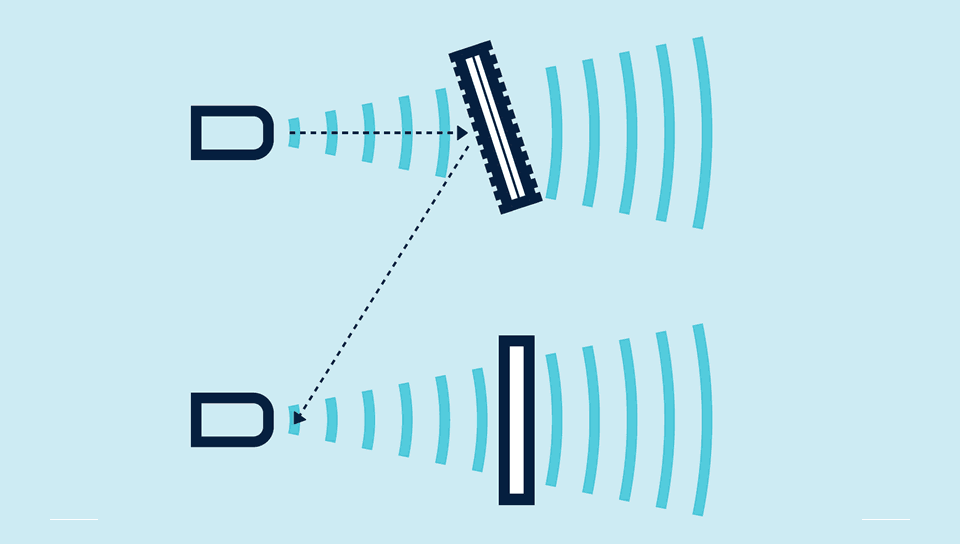
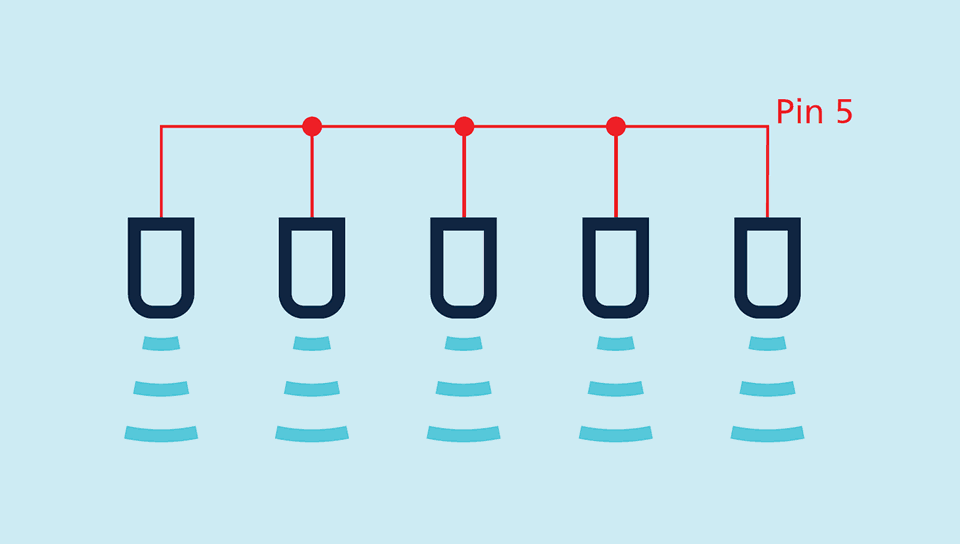
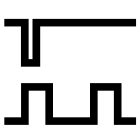
如果两个或更多的传感器相互之间安装的太靠近,就会造成相互干扰。为了避免这种情况的发生,任意两个传感器之间的安装间距必须足够大,或者彼此之间必须使用同步功能。下表列出了非同步传感器之间最小的安装间距。
設置間隔及び同期
.二つ又はそれ以上のセンサーが近すぎて設置されている場合、お互いに影響を与えてしまいます。これを避けるために、設置間隔を十分に大きく、又は複数のセンサーはお互いに同期する必要があります。次の表は同期されていないセンサー間の最小設置距離を記載しております。
| Operating range | 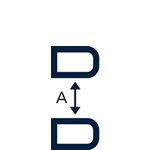 |
 |
|
 |
0.07 m | ≥ 0.25 m | ≥ 1.10 m |
 |
0.15 m | ≥ 0.25 m | ≥ 1.30 m |
 |
0.24 m | ≥ 0.25 m | ≥ 1.40 m |
 |
0.25 m | ≥ 0.35 m | ≥ 2.50 m |
 |
0.35 m | ≥ 0.40 m | ≥ 2.50 m |
 |
0.7 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.0 m | ≥ 0.70 m | ≥ 4.00 m |
 |
1.3 m | ≥ 1.10 m | ≥ 8.00 m |
 |
3.4 m | ≥ 2.00 m | ≥ 18.00 m |
 |
6.0 m | ≥ 4.00 m | ≥ 30.00 m |