







Aanwijzingen voor montage en bedrijf
De ultrasone sensoren kunnen in elke gewenste positie worden gemonteerd en gebruikt. Montageplaatsen waar veel vuil op het sensoroppervlak terechtkomt, moeten worden vermeden. Waterdruppels en dikke korsten op het transductoroppervlak kunnen de werking ongunstig beïnvloeden. Kleine stofafzettingen en neerslagen van kleur hebben geen effect op de werking.
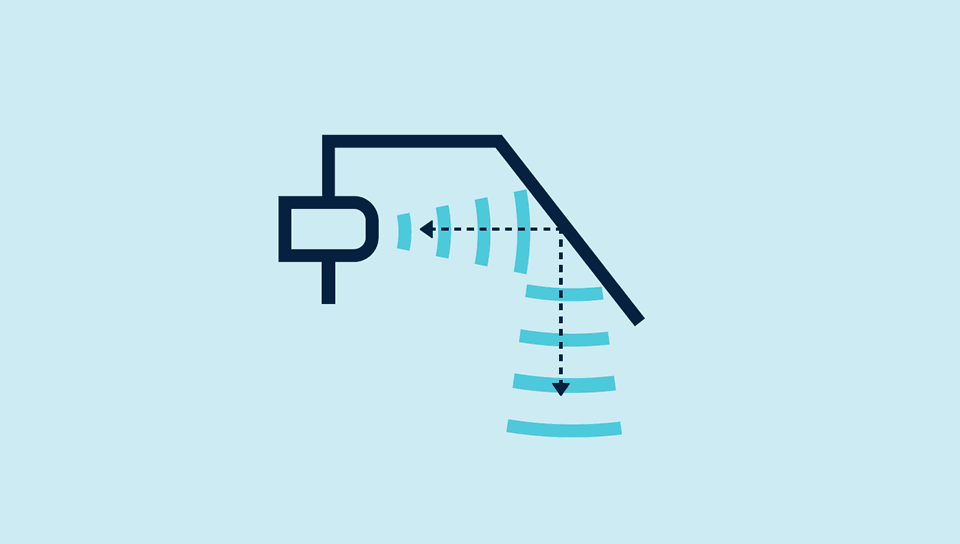
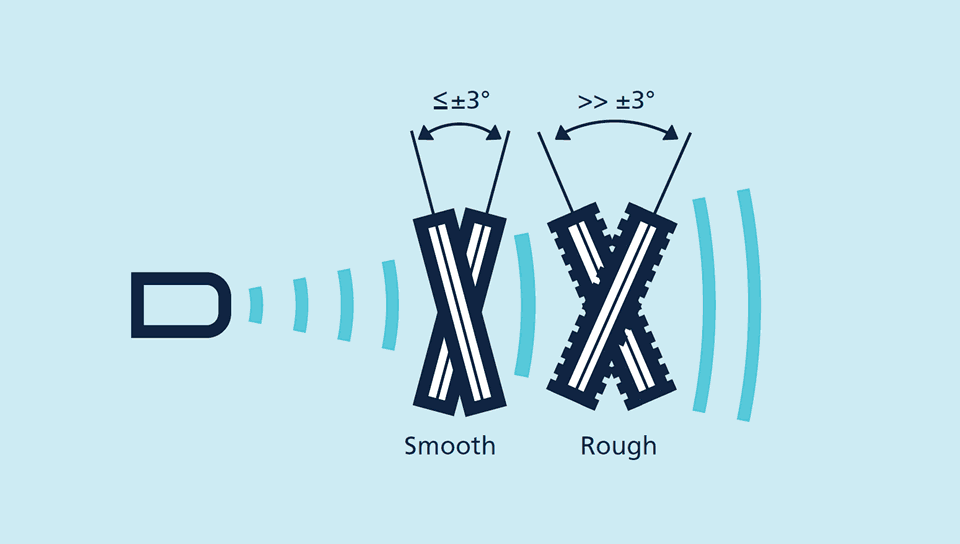
Als de af te tasten objecten een effen en glad oppervlak hebben, moeten de sensoren onder een hoek van 90° ± 3° t.o.v. het oppervlak gemonteerd worden.
Ruwe oppervlakken daarentegen laten veel grotere hoekafwijkingen toe. Een oppervlak wordt als ruw beschouwd voor ultrasoon geluid als de ruwdiepte ervan in de orde van grootte van de golflengte van de ultrasone frequentie of hoger ligt.
Het geluid wordt dan diffuus teruggekaatst, wat tot een kleinere bedrijfsdetectiewijdte kan leiden. Bij ruwe oppervlakken dienen de maximaal toelaatbare hoekafwijking en de grootst mogelijke detectiewijdte proefondervindelijk bepaald te worden.
Geluidsabsorberende materialen zoals watten of zachte schuimstoffen kunnen de bedrijfsdetectiewijdte verkleinen. Vloeistoffen en vaste materialen reflecteren het geluid daarentegen erg goed.
Montageafstanden en synchronisatie
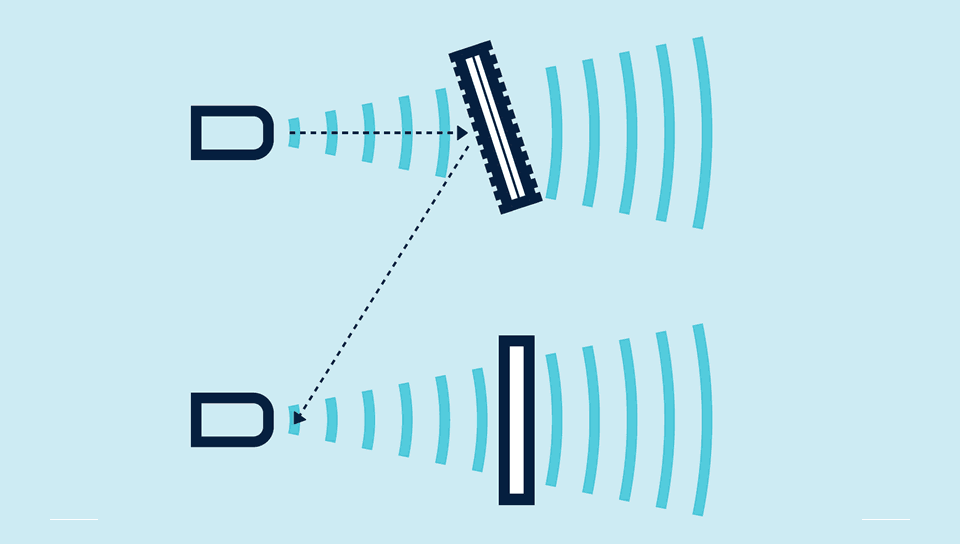
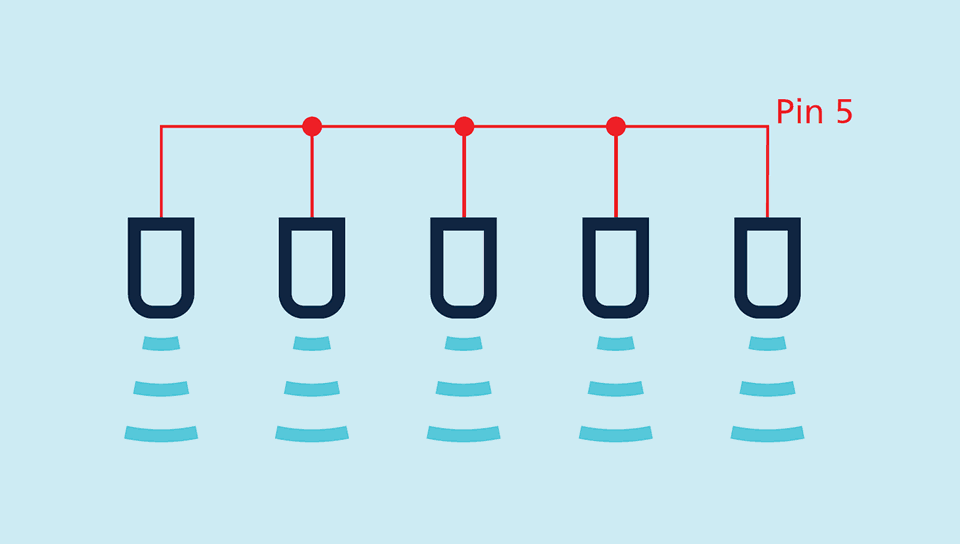
Worden er twee of meerdere sensoren op een te korte afstand van elkaar gemonteerd, dan kunnen ze elkaar beïnvloeden. Om dit te vermijden, moeten ofwel de montageafstanden groot genoeg gekozen, ofwel de sensoren onderling gesynchroniseerd worden. De onderstaande tabel geeft de minimale montageafstanden tussen niet-gesynchroniseerde sensoren aan.
Minimale montageafstanden tussen niet-gesynchroniseerde sensoren aan
Operating range
0.07 m
≥ 0.25 m
≥ 1.10 m
0.15 m
≥ 0.25 m
≥ 1.30 m
0.24 m
≥ 0.25 m
≥ 1.40 m
0.25 m
≥ 0.35 m
≥ 2.50 m
0.35 m
≥ 0.40 m
≥ 2.50 m
0.7 m
≥ 0.70 m
≥ 4.00 m
1.0 m
≥ 0.70 m
≥ 4.00 m
1.3 m
≥ 1.10 m
≥ 8.00 m
3.4 m
≥ 2.00 m
≥ 18.00 m
6.0 m
≥ 4.00 m
≥ 30.00 m
| Operating range | |
|
|
|
0.07 m | ≥ 0.25 m | ≥ 1.10 m |
|
0.15 m | ≥ 0.25 m | ≥ 1.30 m |
|
0.24 m | ≥ 0.25 m | ≥ 1.40 m |
|
0.25 m | ≥ 0.35 m | ≥ 2.50 m |
|
0.35 m | ≥ 0.40 m | ≥ 2.50 m |
|
0.7 m | ≥ 0.70 m | ≥ 4.00 m |
|
1.0 m | ≥ 0.70 m | ≥ 4.00 m |
|
1.3 m | ≥ 1.10 m | ≥ 8.00 m |
|
3.4 m | ≥ 2.00 m | ≥ 18.00 m |
|
6.0 m | ≥ 4.00 m | ≥ 30.00 m |