







El criterio de selección más importante
para un sensor ultrasónico es la amplitud de exploración y la zona de detección tridimensional asociada.
Para medir, diversos reflectores normales se conducen por fuera, lateralmente, por las zonas de detección y se marcan los puntos en el que el sensor identifica el reflector.
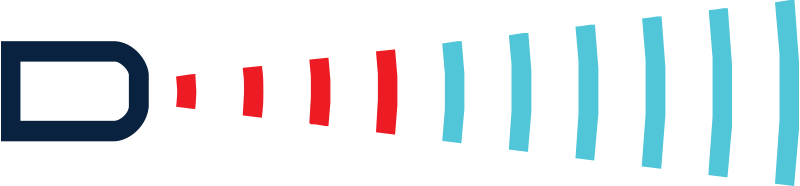
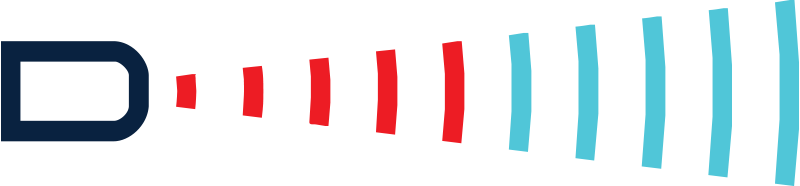
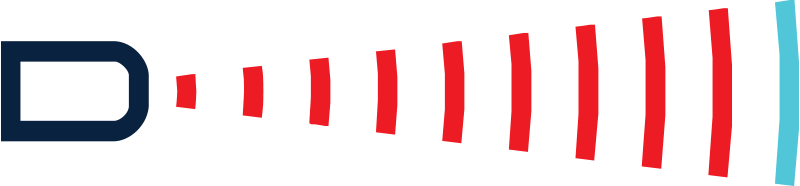
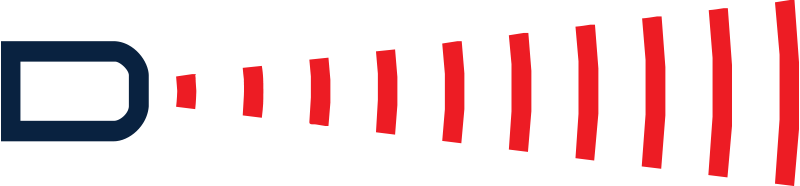
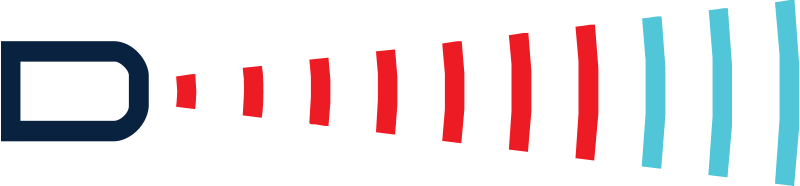
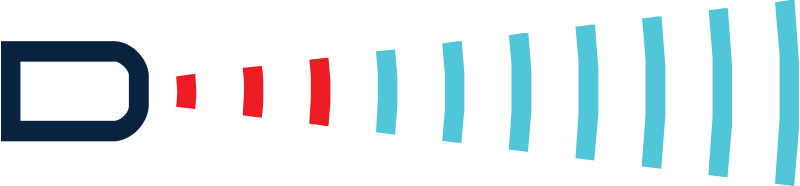
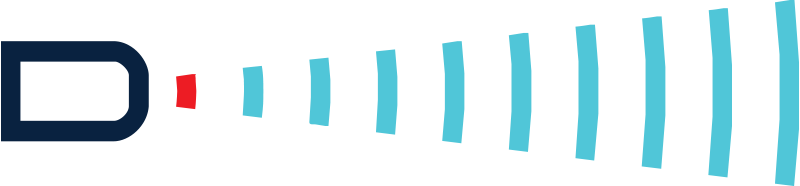
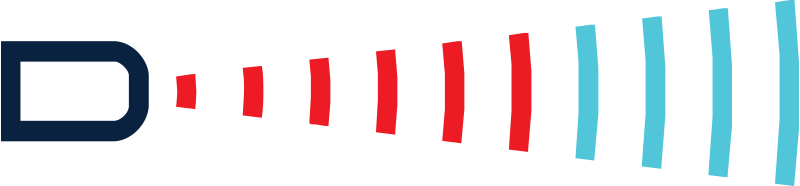
Las zonas rojas
se miden con una barra redonda fina (10 mm o bien 27 mm de diámetro, según el tipo de sensor) y muestran la zona de trabajo típica de un sensor.
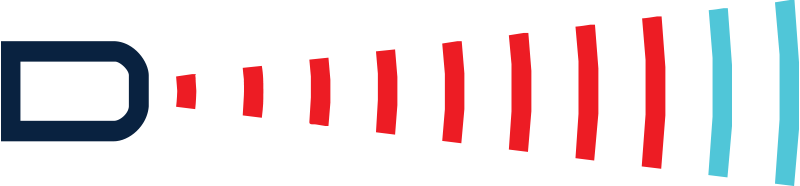
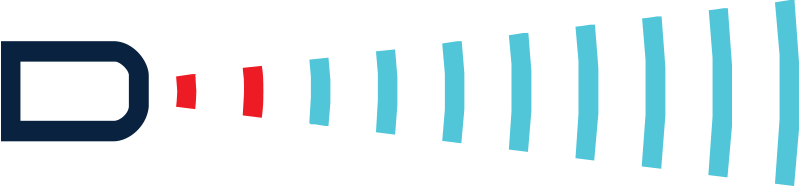
Para obtener las zonas azules,
se conduce por fuera una placa (500 x 500 mm2), lateralmente, en los campos sonoros. Aquí se ajusta siempre el ángulo óptimo de la placa respecto al sensor.
Esta es, por consiguiente, la zona de detección máxima del sensor. Fuera de los haces acústicos azules ya no es posible una evaluación de las reflexiones ultrasónicas. Un reflector con peores propiedades de reflexión que la barra redonda, es detectado por los sensores en una zona que es inferior a su zona de trabajo roja. Por el contrario, un reflector con mejores propiedades de reflexión tendrá una zona de detección que, en su tamaño, se encuentra entre la zona de detección roja y azul.

 Vara redonda, 10 mm Ø ó 27 mm Ø
Vara redonda, 10 mm Ø ó 27 mm Ø Distancia de exploración de trabajo
Distancia de exploración de trabajo Placa de 500 x 500 mm
Placa de 500 x 500 mm







